VRS to Hall Crank Sensor Adapter
I was recently contacted by someone who wanted to fit a Rover 75 /
MG ZT Turbo engine into a different vehicle. It needed to work with a standard
K Series gearbox, flywheel and crank sensor.
Problems
There are a few problems with this:
1.
The Rover 75 & MG ZT ECUs use BMW EWS 3.D
security. They can’t just be matched to a new immobiliser. They won’t run the
engine unless they find all the other electronic modules in the vehicle
correctly coded to match.
2.
The Rover 75 & MG ZT use a different
flywheel and gearbox, and the crank sensor trigger has a different “missing
tooth” pattern. They won’t synchronise to a standard K Series flywheel pattern.
3.
The crank sensor used on the Rover 75 & MG
ZT is a Hall effect sensor, rather than a Variable Reluctance Sensor (VRS) as
used on other K Series. The Rover 75 & MG ZT ECUs won’t read the signal
from a regular VRS sensor.
Solutions
My solutions to these problems were, in order:
1.
I took a regular Rover 75 or MG ZT Turbo ECU.
Using MEMS3 Mapper, I applied the MEMS3 Firmware Immobiliser Delete Wizard. This disabled the code that kills the injectors
when immobilised, permanently removing the immobilisation and EWS 3.D security
functions.
2.
Using
MEMS3 Mapper, I applied the MEMS3 Flywheel
Trigger Pattern Wizard. This remapped the ECU to recognise the
standard MEMS3 flywheel trigger pattern.
3.
I built an adapter that converted
the VRS crank sensor signal into something that looked like a Hall effect
sensor output.
The VRS to Hall Adapter
I’m going to build and sell a few of these adapters.
If anyone is looking for something like this, please just get in touch with me.
Alternatively, you can build your own. The design details are shown below.
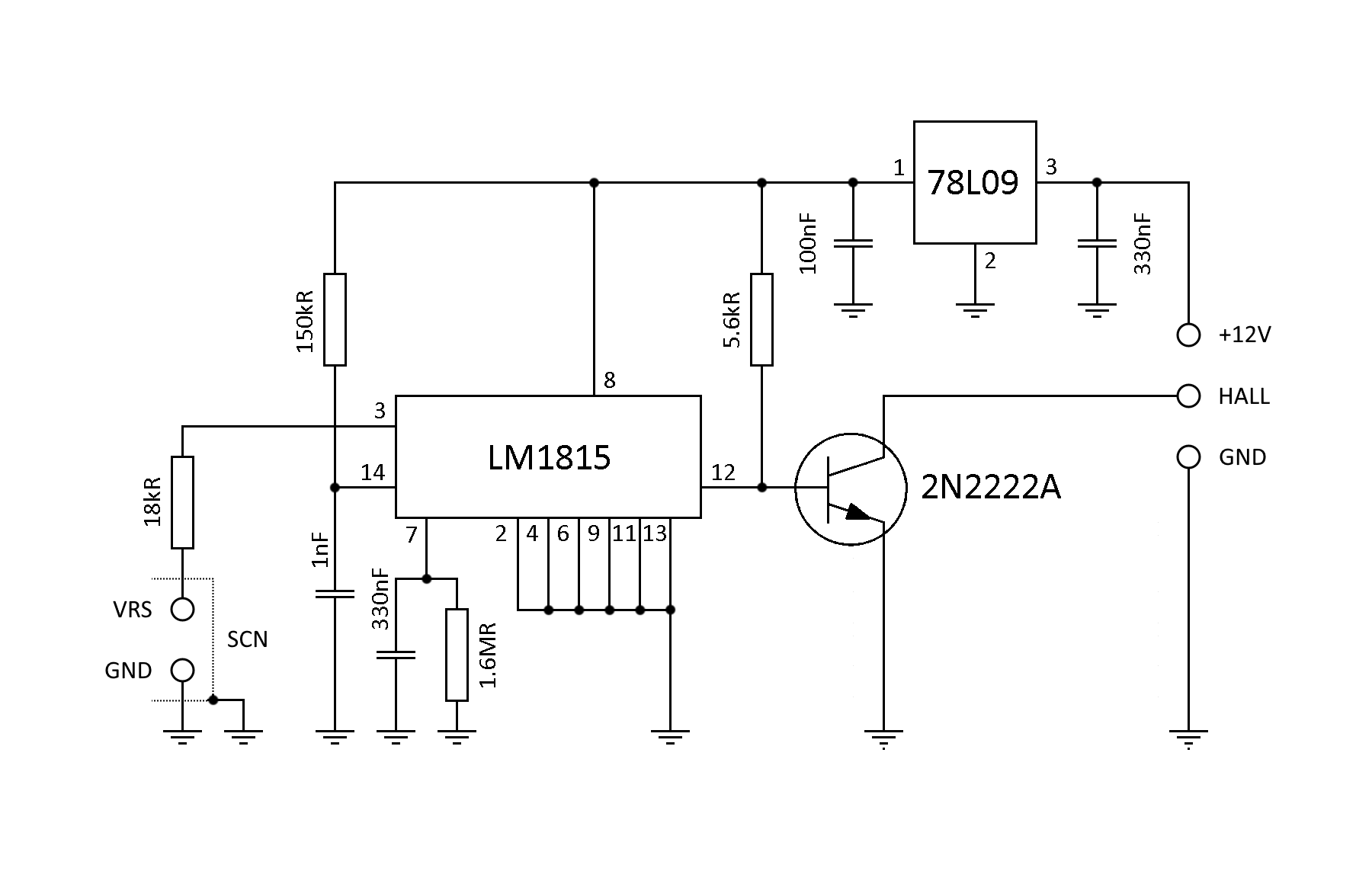
The adapter is built around an LM1815 VRS Sensor
decoder chip. The only other active components are a 2N2222A switching
transistor mimic the Hall sensor output and a 78L09 linear low power voltage
regulator to provide 9V for the LM1815. Note that to facilitate easy
prototyping, I used the LM1815N version which is available as a 14-pin DIP
package. Although the LM1815 is still a current design, the N version in the
DIP package is now hard to get hold of and was ordered from China. A few
passive components are used to set timing parameters, limit the input signal
and provide power supply filtering.
It’s such a simple design, I just built it on
stripboard, 7 strips by 10 holes. Note the 6 spot track cuts and two tinned
copper link wires that run under the IC. Some IC pins were removed to
facilitate a more compact layout.


The protype was just packaged between two small
plastic half-cases taped closed for testing. Final production versions sold
will be potted in epoxy for robustness:
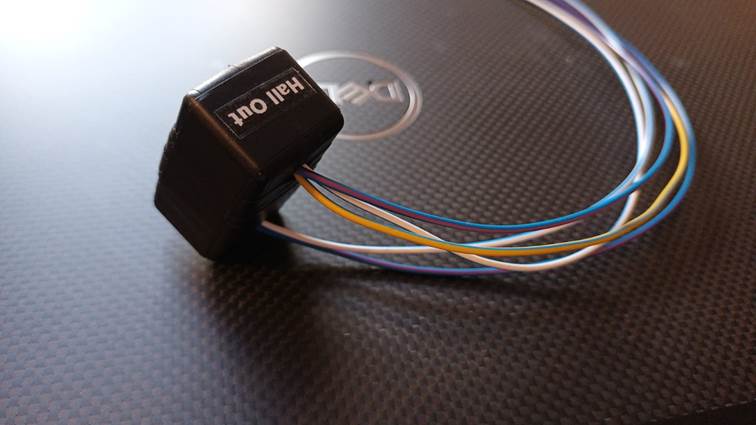
There are just 5 wires to connect. At one end there
are two wires to connect to the VRS crank sensor, in White/Blue and Blue/Purple
(to match the wiring loom colours used in the regular K Series engine looms).
At the other end there are three wires to connect to the Rover 75 engine loom
in place of the 3-pin Hall effect crank sensor, in White/Blue, Blue/Purple and
Yellow/Blue (to match the wiring loom colours used in the Rover 75 & MG ZT
engine loom). The VRS sensor leads are screened, but the screen should NOT be
connected at the sensor end.
Result
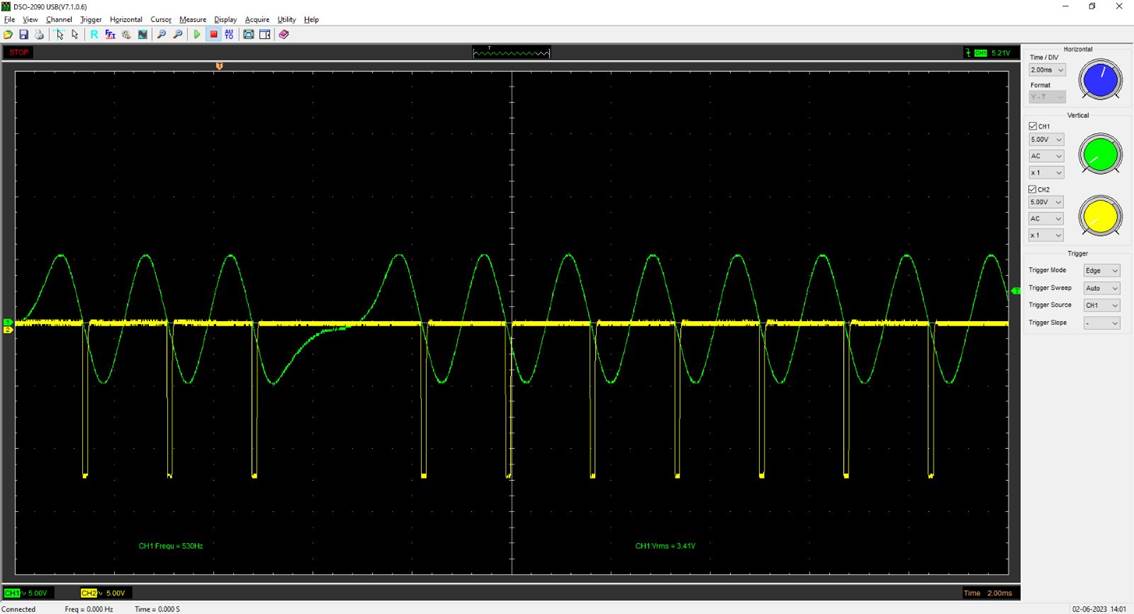
This image shows the VRS signal from the standard K
Series crank sensor in green and the Hall effect type output generated from it
by the adapter the module in yellow. This consists of a +12V quiescent level
with negative-going 0V pulses. It’s an open-collector switch output to match
the actual Hall effect sensor, the ECU contains a pullup resistor on the input.
The ECU only looks for the negative-going zero-crossings in the VRS signal and
the negative-going edges in the Hall effect signal which can be seen to
coincide exactly. The output pulses are a fixed width, and are therefore closer
to 50% duty cycle at the rev limit of the engine.
The falling edges of the VRS waveform correspond to
the tooth centres. I was initially unsure whether the falling edges of the Hall
effect pulses would be interpreted as tooth centre positions or tooth edges, in
which case a half-tooth or 5° degree timing error may be created, so I checked
that the end-of-injection timing was mapped to a flat 330° in the ECU and then
scoped the injector waveform against the original VRS signal (injection is a
lot easier to use for this check than ignition as there are lots of different
adjustments applied to the ignition timing, but the injection timing is just
taken from one table). You can see that the end of the injector pulse aligns
exactly to the negative going zero-crossing of the VRS signal which corresponds
to the tooth centre at 330° (the two “missing” falling edges following the end
of the injection pulse are at 30° and 60° and each tooth period corresponds to
10°, so counting back from the first “missing” falling edge we have 30°, 20°,
10°, 0°, 350°, 340° then 330°). So the ECU is
correctly interpreting the crankshaft angle from the output of the adaptor.
